Una increíble plataforma mecatrónica para construir robots.
KM82 no sólo es un kit,es una increíble plataforma mecatrónica de precisión con la que aprenderás a diseñar, controlar y programar tu propio chasis robótico, incluye todo los componentes necesarios para armarlo, motores, ruedas, electrónica, partes mecánicas y por supuesto un Arduino UNO Original.
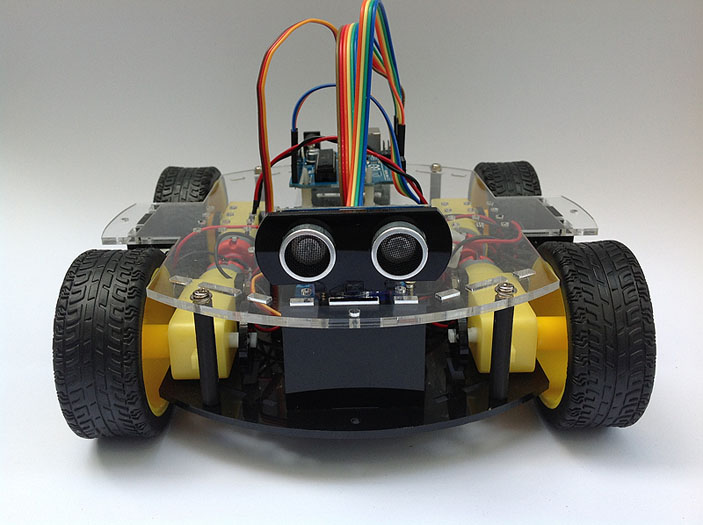
KM82b Vista frontal
El primer robot con chasis diseñado y fabricado íntegramente en el Perú
KM82 no es un juguete, es un laboratorio de aprendizaje para mecatrónica, con el aprenderás sobre el control de servos y motores, medir distancias, movimiento, aceleración, avance, retroceso, giros precisos, desplazamiento y sobre todo una cosa, aprenderás a desarrollar tu propio proyecto, no esperes recibir todo hecho, hay tantas posibilidades, que el único límite que vas a tener es tu imaginación.
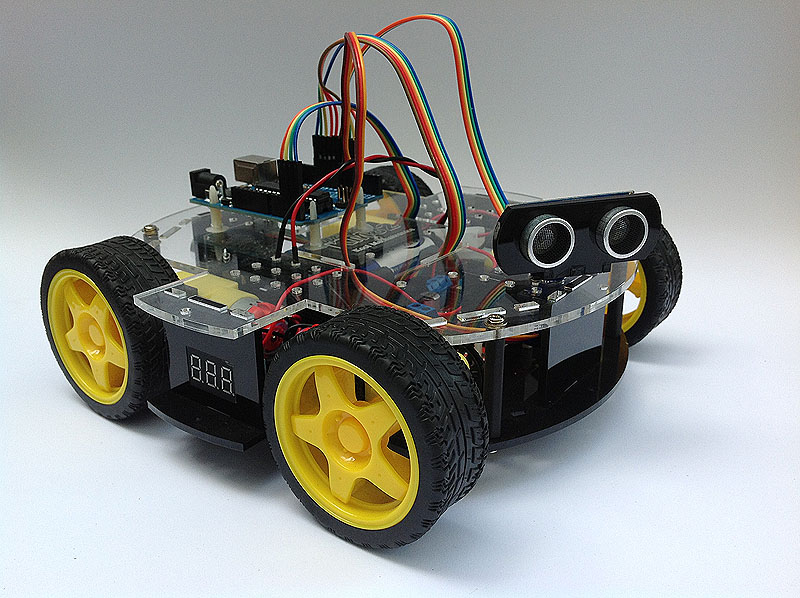
KM82b Vista lateral
Es un sistema es modular y ampliable, empezarás por construir una plataforma de tracción totalmente profesional, pero en escala, con cuatro motores para moverla, en la que controlaras la dirección, la velocidad, el sentido de la marcha los giros con una increíble precisión.
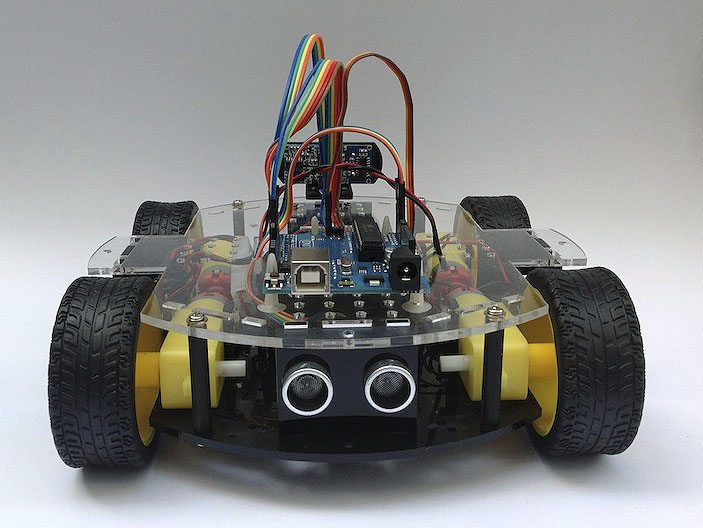
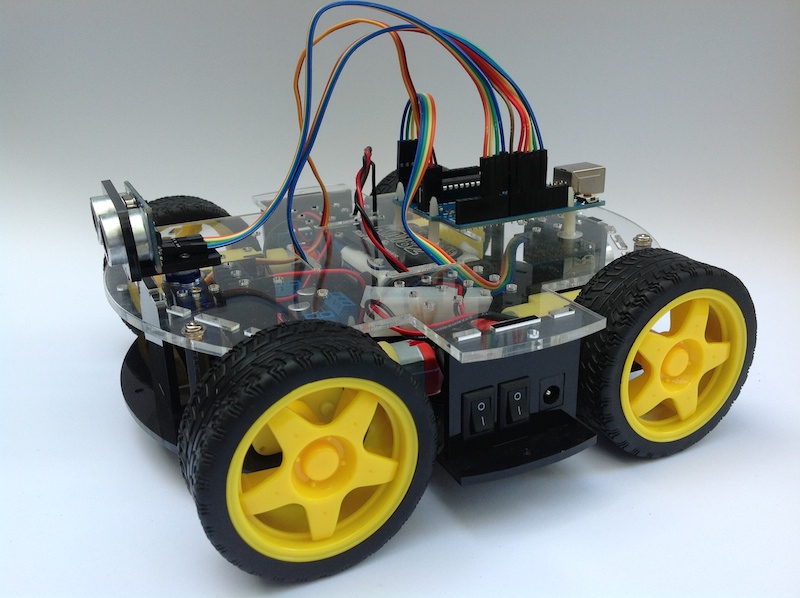
KM82b Vista trasera
Puedes diseñar desde un robot básico, con un sistema de medición de distancia por ultrasonidos guiado por un servo para que no choque con otros objetos, hasta una plataforma de tracción profesional con contador de revoluciones, contador de avance, giros mediante compás magnético, acelerómetro, seguidor de línea y además conectarla con otros dispositivos como GPS, Bluetooth o tu celular.
KM82b Vista lateral
Ampliable, expandible, personalizado y actualizable
KM82 es un producto en continua evolución, al que frecuentemente se le añaden nuevas opciones que están en desarrollo o que nos piden los usuarios, nuevos ejemplos de programas, cofiguraciones con diferentes Microcontroladores y Drivers, etc..
Kit KM82 en su caja.
También las páginas en línea del manual, instrucciones de montaje, ejemplos y consejos se actualizan continuamente.
Actualmente estamos trabajando en:
Detector de contacto para obstáculos.
Pantallas LCD 16×2 y 20×4.
Librerías para Arduino YÚN
Configuración con Shield y controlador Grove.
Configuración con Arduino Mega.
Configuración de seguidor de línea.
Librerías de control de motores inteligente.
Librerías de control por RPM
Mando a distancia con Bluetooth.
Y muchos más…
Incluye un Arduino UNO Original
KM82 es un producto beta de producción limitada, todos los componentes son Open Hardware y esta pensada para que sea el propio usuario el que diseñe y programe específicamente su plataforma de acuerdo a su proyecto, podrás descargar desde la web, nuevos programas de ejemplo y librerías que se irán actualizando constantemente.
No todas las características tienen porque ser soportadas simultáneamente, debido a la complejidad del software y la cantidad de combinaciones posibles, pueden darse incompatibilidades entre los accesorios y sensores que se añadan específicamente en cada proyecto.
Características de la Plataforma de Tracción.
La plataforma de tracción es la parte básica de cualquier sistema autotransportado, el kit básico incluye todo lo necesario para construir tu primera plataforma robótica, sólo necesitarás 6 baterías recargables de 1.2V y disponer de un cargador de 7.2V.
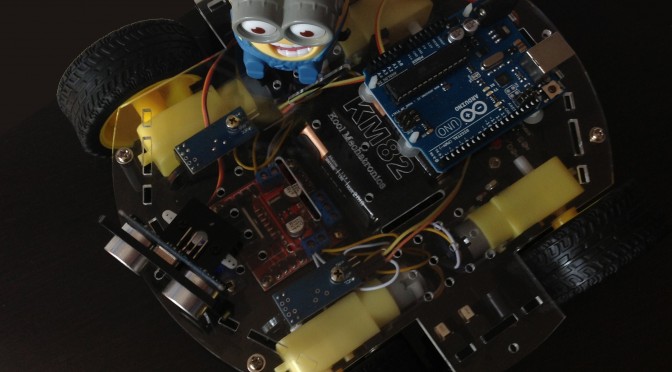
KM82b Detalle del controlador de motor
Todas las herramientas que necesitas para armarlo son: Un soldador y estaño para las conexiones eléctricas, una tijera de electricista o un pelacables, un destornillador pequeño y una llave Allen de 3mm para los tornillos.
Plataforma avanzada
Estamos trabajando en la segunda fase del proyecto KM82, para convertir nuestra plataforma de un chasis robótico normal a un modelo de alta precisión. Además en ese paso aprenderemos como controlar la distancia y giro con precisión industrial, ademas de conectar varios Arduino entre si para trabajar juntos.
Utilizará un sistema de control de movimiento inteligente, basado en dos contadores de revoluciones y un compás magnético, que permiten mantener constante la dirección del chasis y la velocidad de ambos grupos de motores, consiguiendo un nivel de precisión en avance y giro verdaderamente profesional.
La versión completa de la segunda fase, incluirá un software de control plataforma utiliza software que necesita varias interrupciones y temporizadores del Controlador, incluye orientación con compás magnético, sonido, dos medidores ultrasónicos de distancia y varios servos, por eso será necesario utilizar varios Arduino o un Arduino Mega para poder controlar todos los sensores y actuadores.