Armado del circuito eléctrico
Existen múltiples posibilidades de armado, el definitivo dependerá del tipo de controlador y placa que estés utilizando, el panel de potencia incluye dos interruptores independientes y un conector el cargador de las baterías.
Esta no es una guía exacta de los pasos a seguir, tómala como un modelo de ejemplo sobre el que desarrollar tu propio robot.
Hay dos versiones diferentes del KIT, la primera es el KM82 estándar, incluye una Shield para manejar los motores y servos que se inserta directamente encima del Arduino.
La segunda, el modelo KM82b, normalmente se utiliza cuando se va a usar un Arduino Mega, o Arduino DUE e incluye un controlador de motores independiente que se conecta al Arduino mediante I/O.
Si utiliza una shield instalada encima del Arduino, solamente necesitarás utilizar un interruptor y conectar su salida directamente a la shield de motores, el Arduino se alimenta a través de ella, el otro lo puedes utilizar libremente.
Si utilizas un controlador de motores independiente, podrás aprovechar el segundo interruptor para administrar la alimentación de tus motores de forma independiente, esto te ayudará cuando estés programando ya que podrás programar tu Arduino sin necesidad de que los motores estén funcionando.
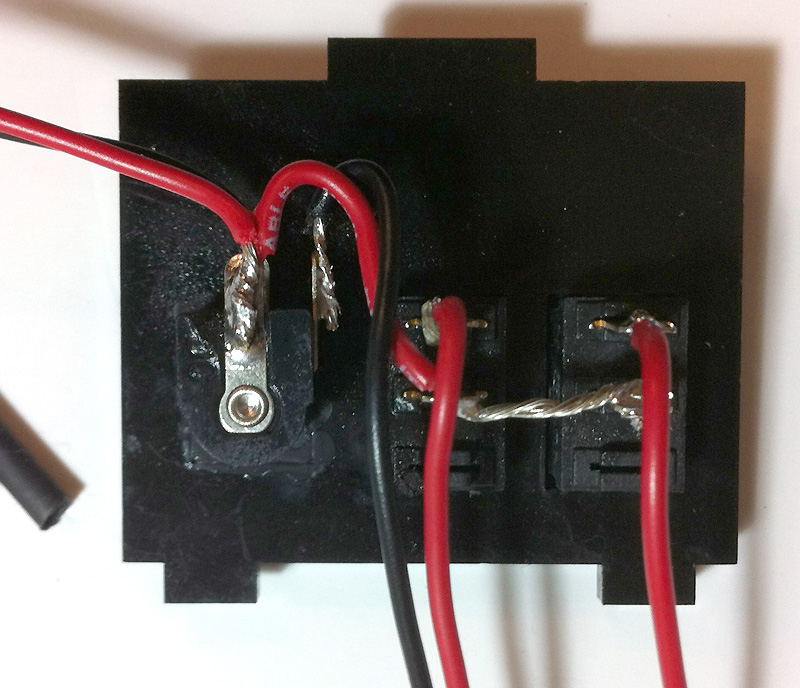
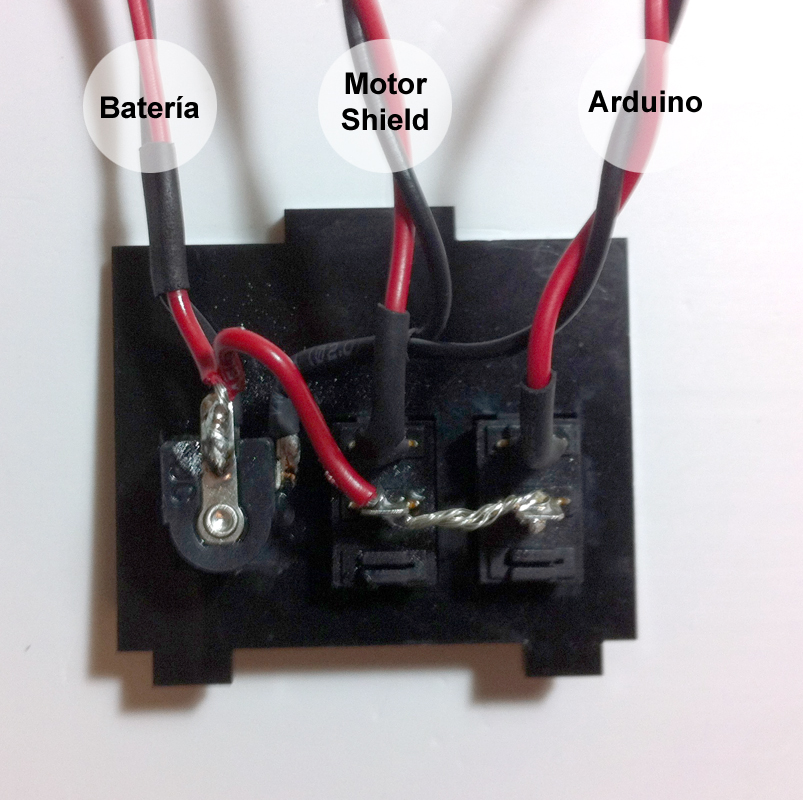
Montaje del Panel de Alimentación.
-
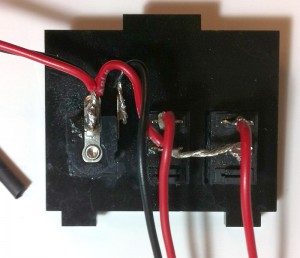
KM82 Ejemplo de conexiones en panel de potencia. -
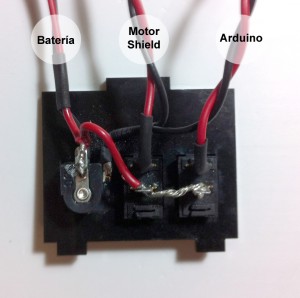
KM82 Ejemplo de distribución desde el panel de potencia.
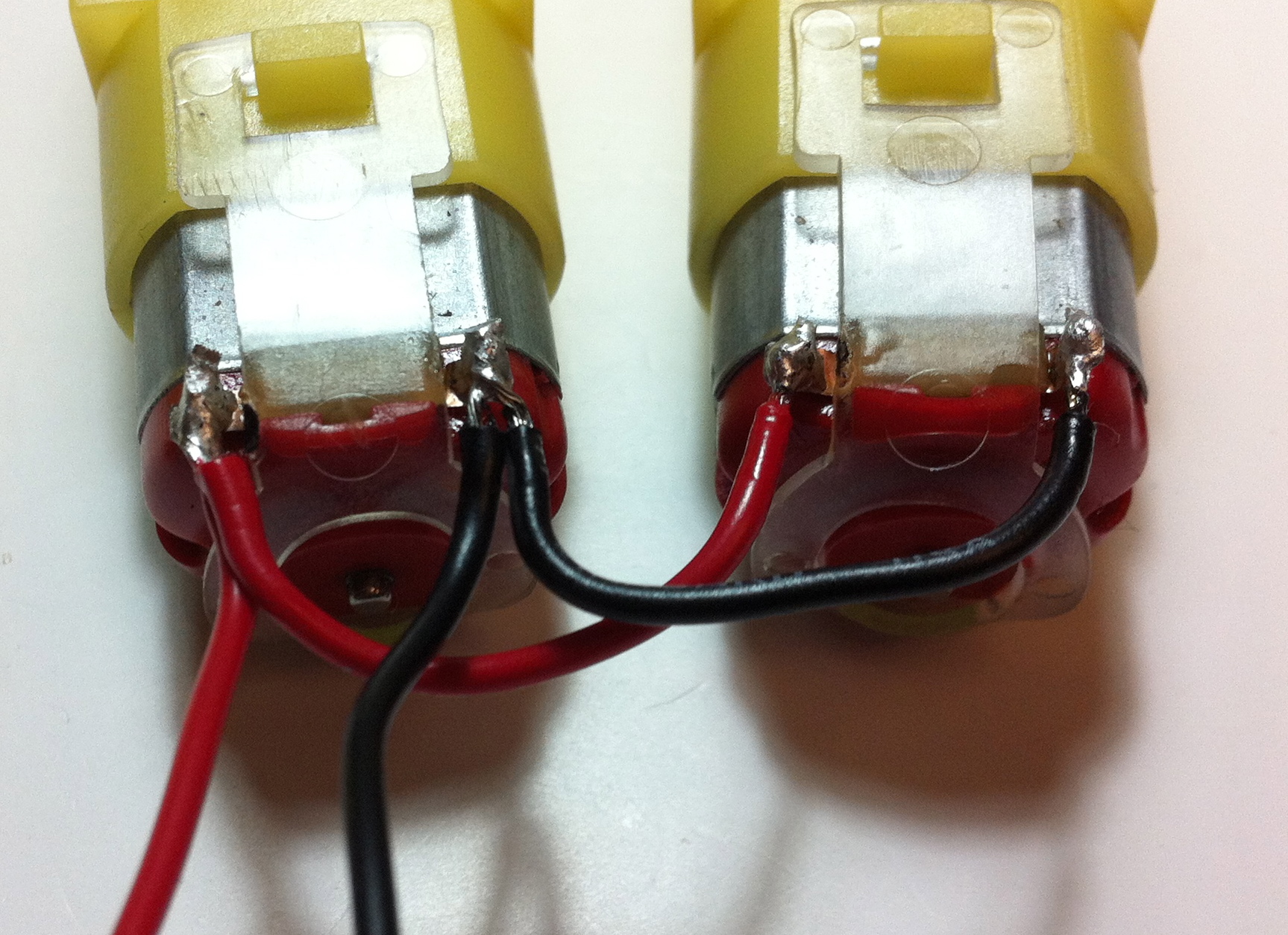
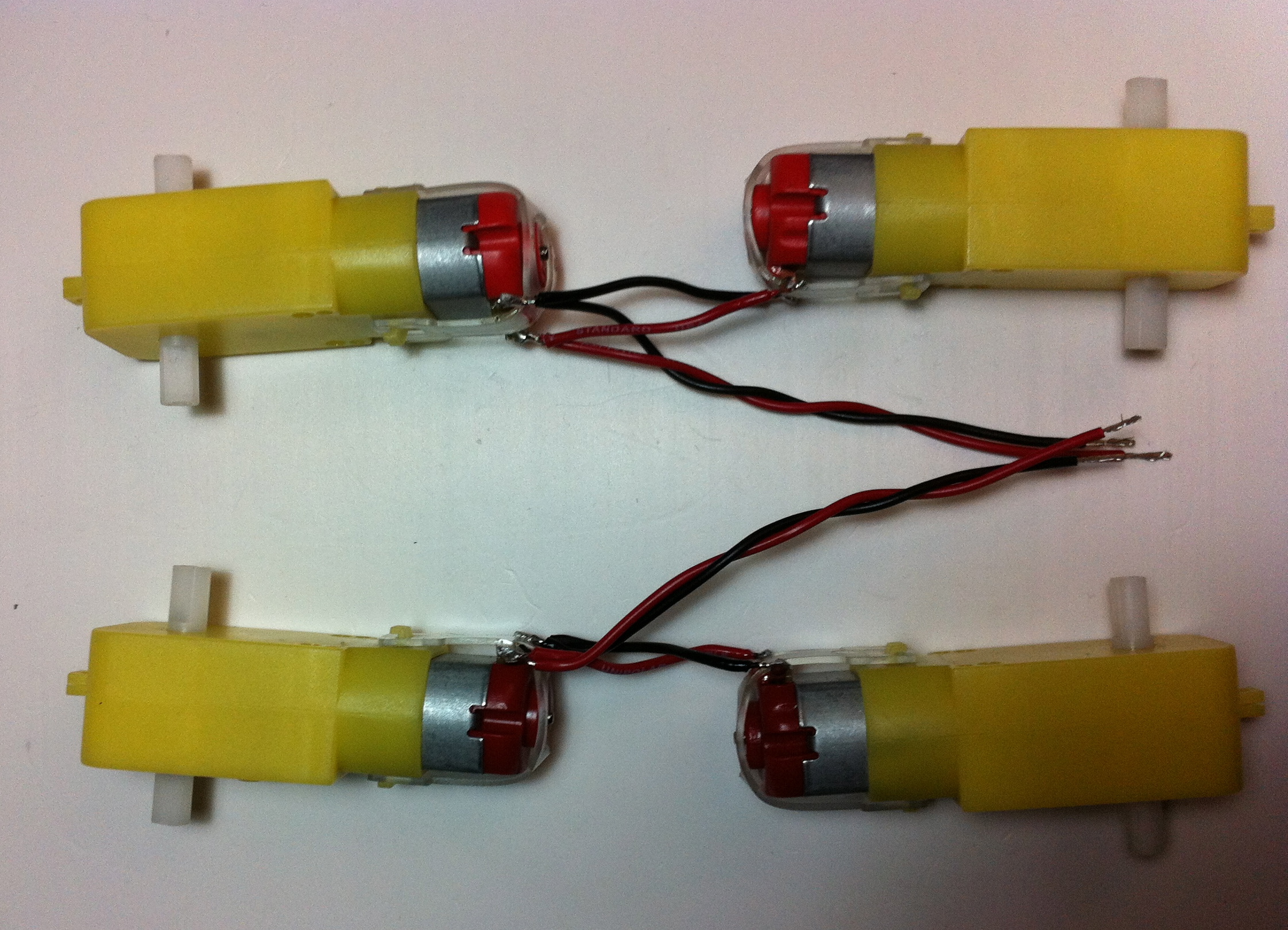
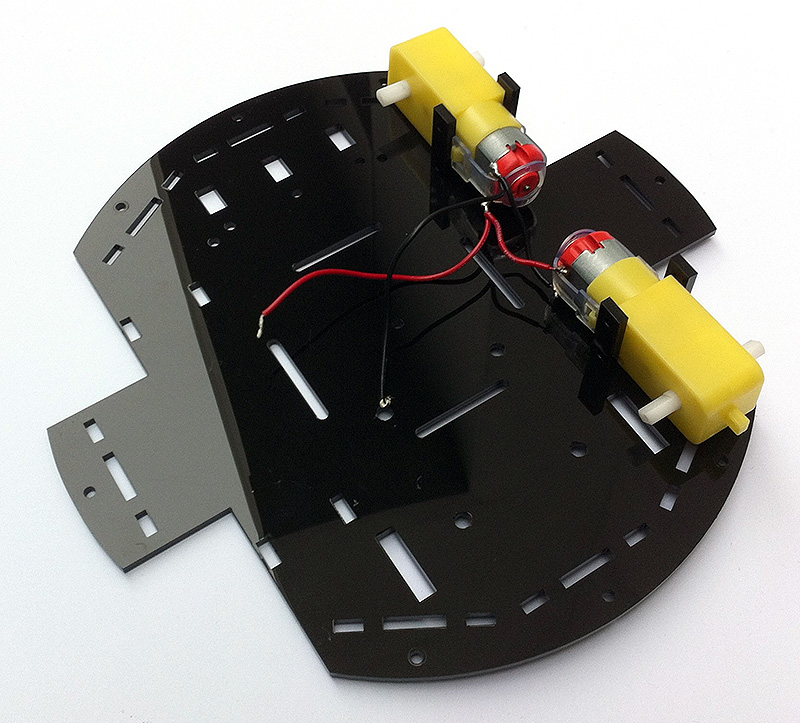
Conexión eléctrica de los motores.
Este tipo de configuración utiliza los motores en paralelo, pero si la alimentación es mayor de 7.2V, es preferible conectar los motores en serie.
-

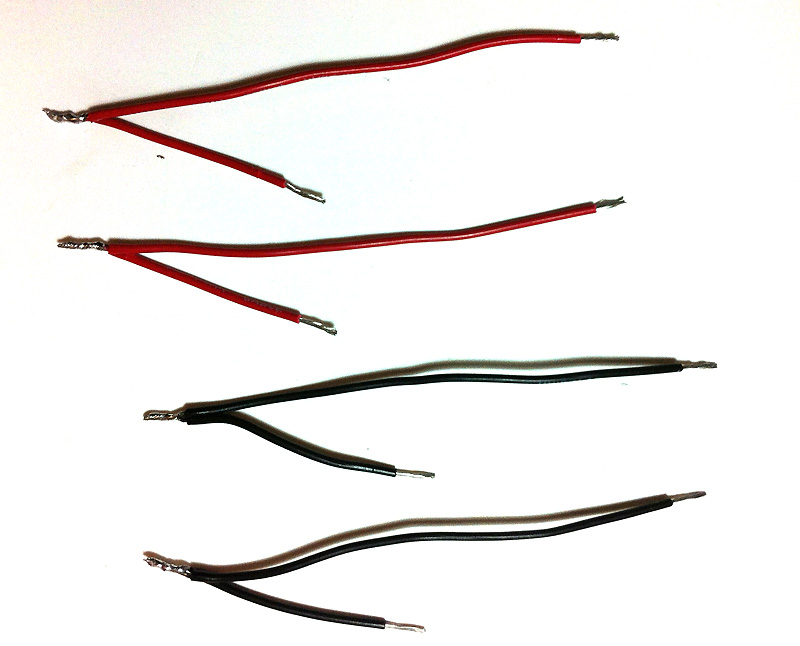
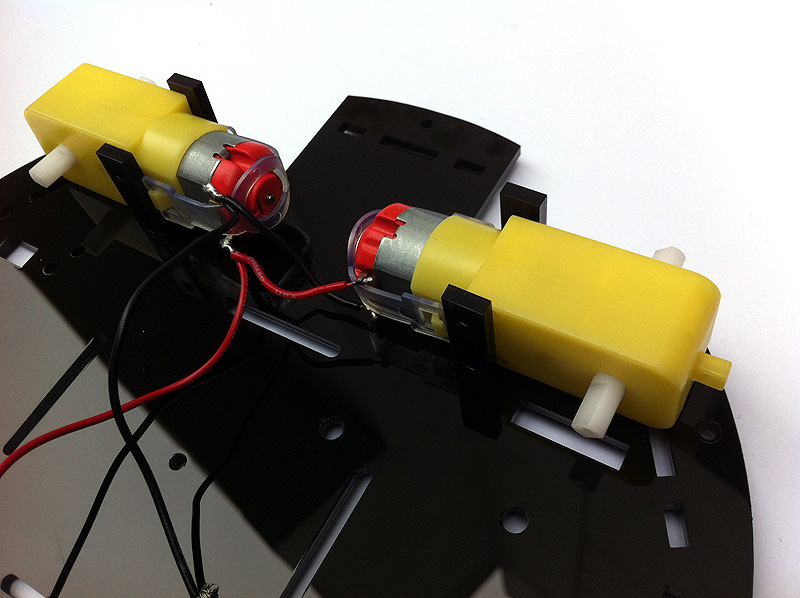
Cables de alimentación para los motores -

Ejemplo de conexión en paralelo de los motores -
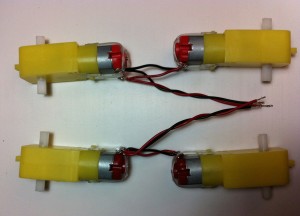
Ejemplo de conexión en paralelo de los cuatro motores
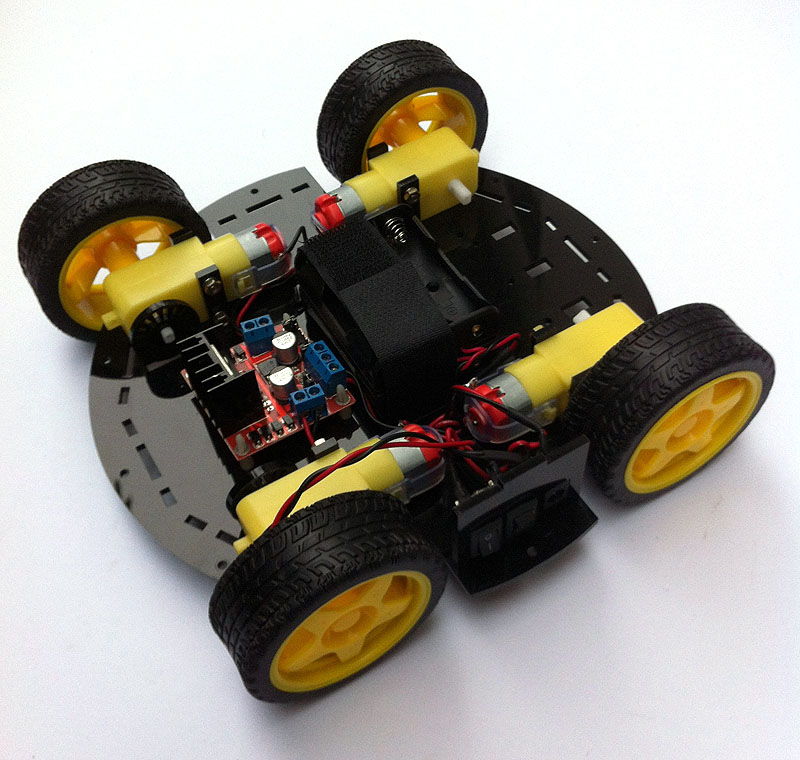
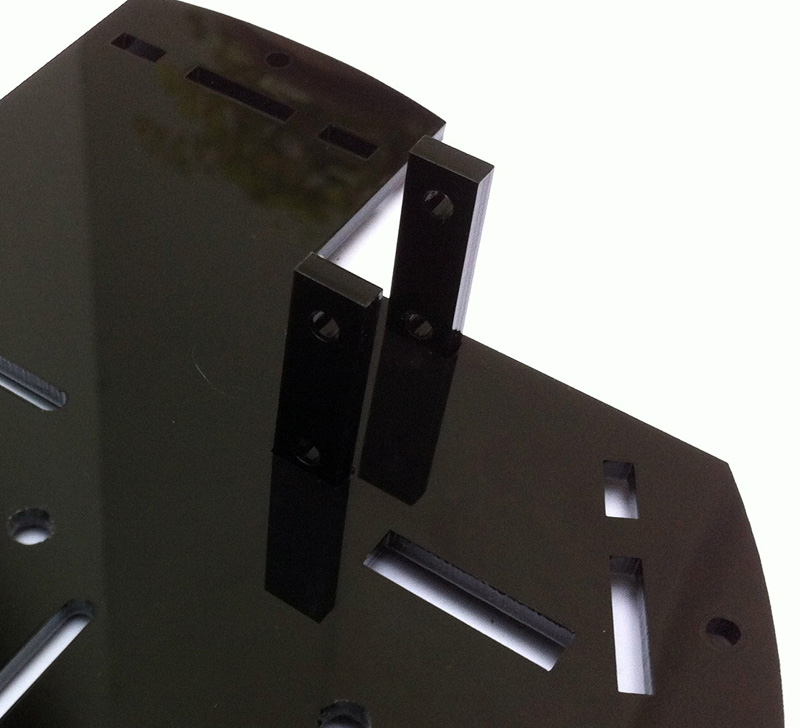
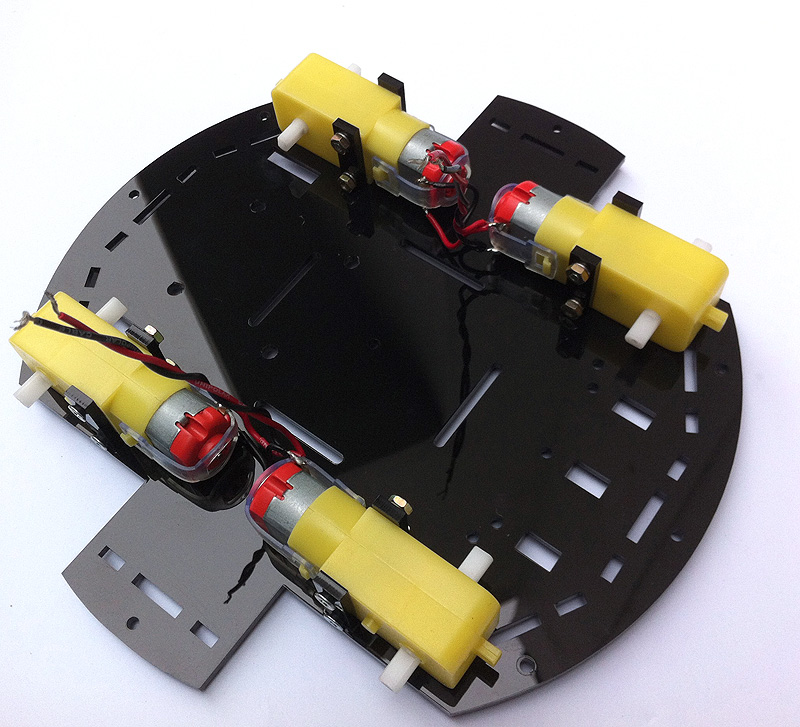
Instalación de los motores.
-
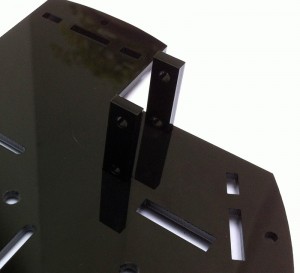
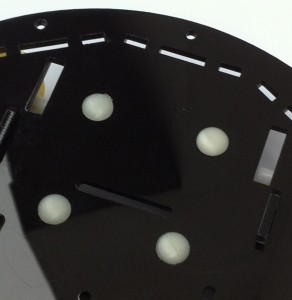
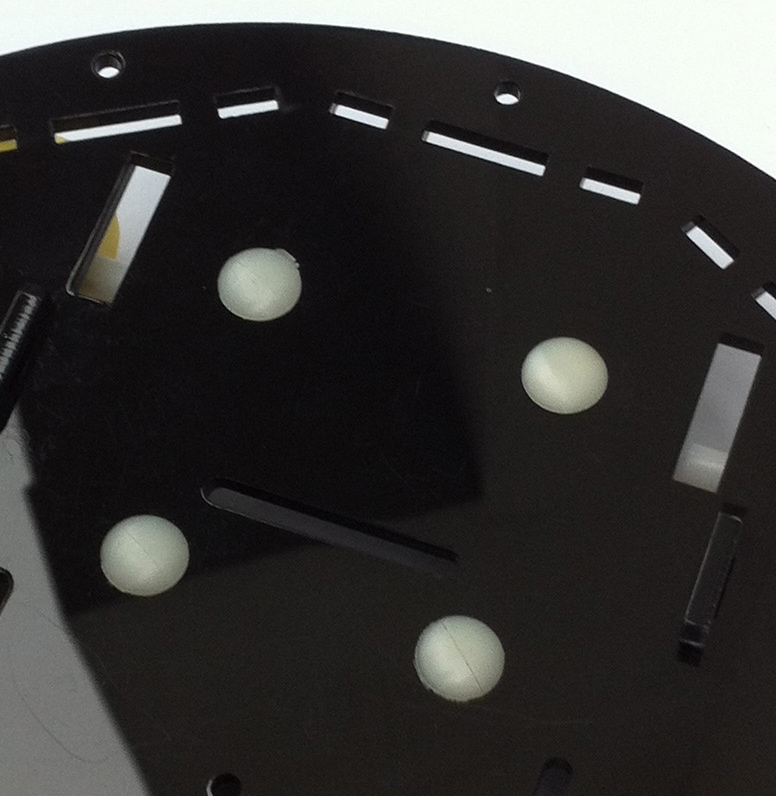
KM82 Soporte de motor. -
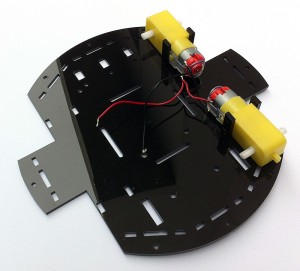
KM82 Instalación de motores. -
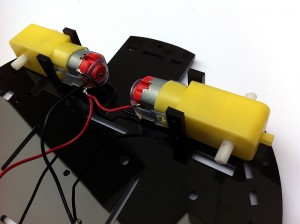
KM82 detalle de la Instalación de los motores. -

KM82 Sujeción de los motores al chasis. -
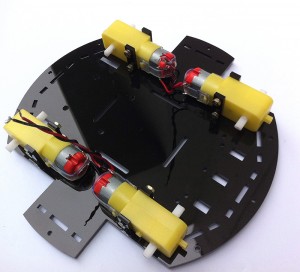
KM82 Chasis con los cuatro motores instalados.

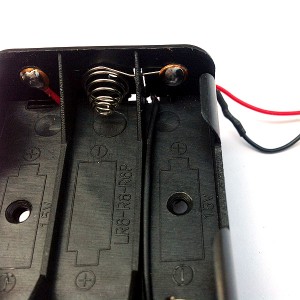
Instalación de la batería
La batería a instalar depende del tiempo que necesitamos de autonomía en el robot, como estándar, se instalan 6 baterías recargables normales de 1.2v.
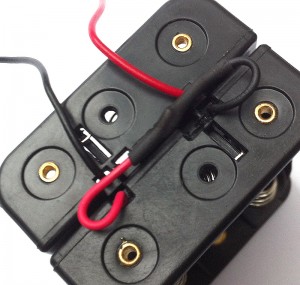
Se conectan los dos portapilas en serie, es decir el positivo del primero con el negativo del segundo, para obtener 7.2V, 6 x 1.2
KM82 también se puede utilizar con pilas normales tamaño AA, preferiblemente de larga duración tipo Duracell, en este caso es necesario conectar los motores en serie, en vez de en paralelo como esta indicado en las instrucciones anteriores, 6 x Pila AA, son 9V y puede ocasionar problemas en los motores.
Si utiliza Pilas normales nunca las intente recargar, pueden explotar y dejar su plataforma inservible.
En algunos casos las baterías recargables son un poco más gruesas que las pilas normales y tienen algunos problemas en los contactos, hay un pequeño truco para solucionarlo que es poner un poco de soldadura en los puntos donde hace contacto el positivo de la batería con el portapilas. Hay que tener mucho cuidado al hacer la soldadura, como el metal esta remachado al plástico, si no lo hacemos rápido, corremos el riesgo de estropear el portapilas.

Conexión del panel de Alimentación.
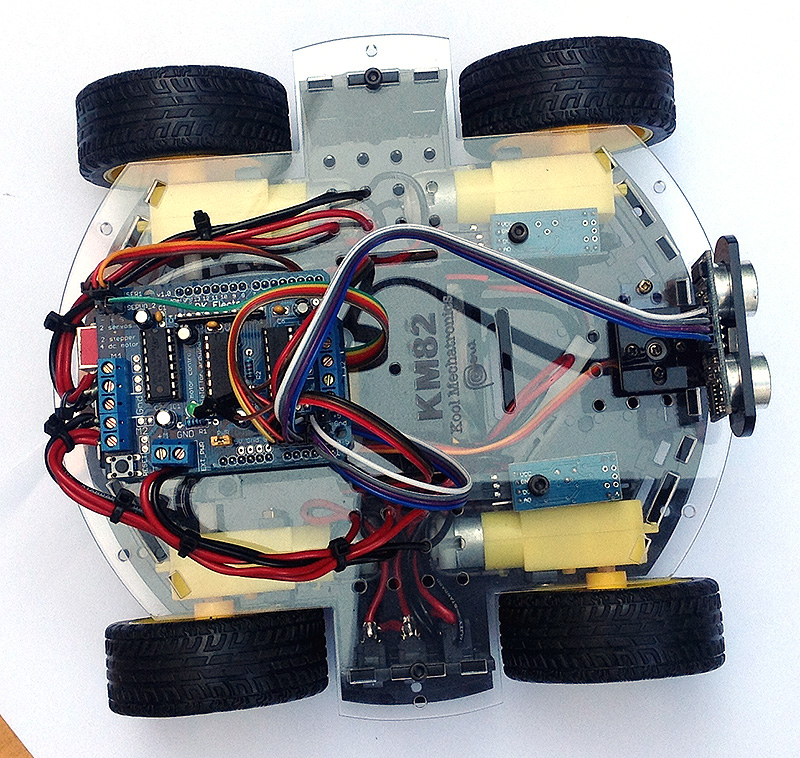
Conexiones eléctricas KM82
KM82 estándar con Shield para manejar los motores.
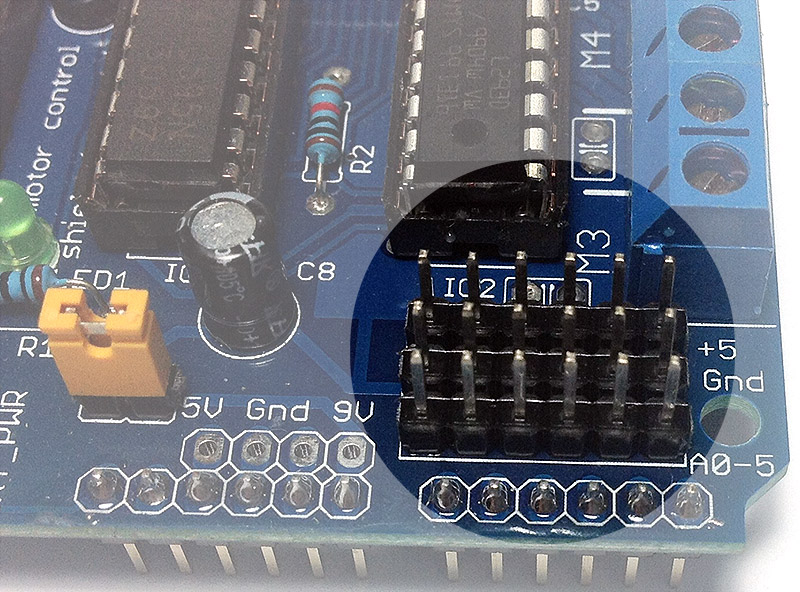
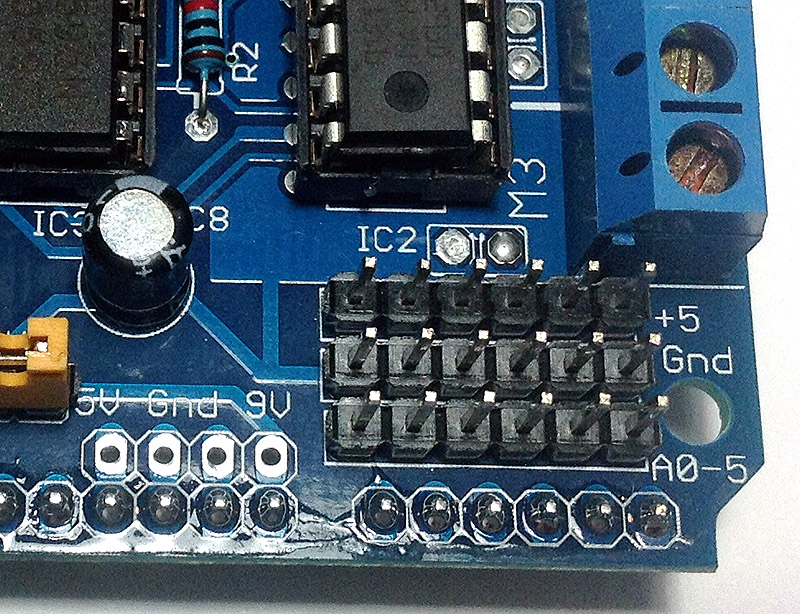
Modificación de la shield de motores.
Es necesario soldar las tiras de pines incluidas en el kit en los orificios de la shield, son 3 tiras de seis pines cada una, para poder conectar los sensores con los conectores y cables incluidos en el kit.
Tener mucho ciado al soldarlo, si lo haces mal puedes estropear tu el shield e inclusa tu Arduino, si no tienes experiencia, pídele que lo haga algún experto y con el soldador adecuado o también puedes ponerte en contacto con nosotros para que te proporcionemos una placa finalizada.
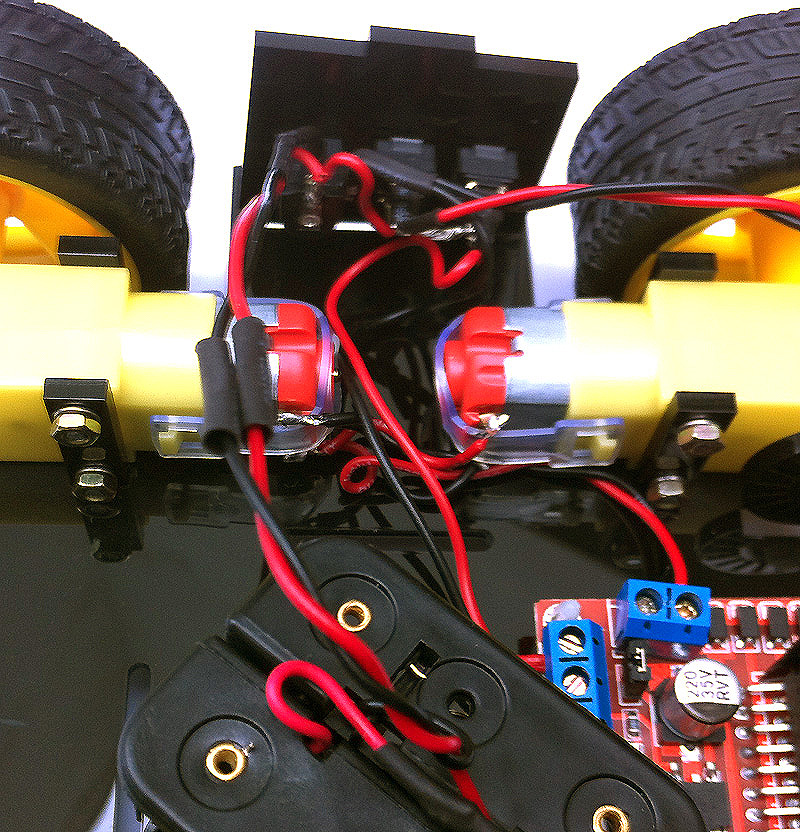
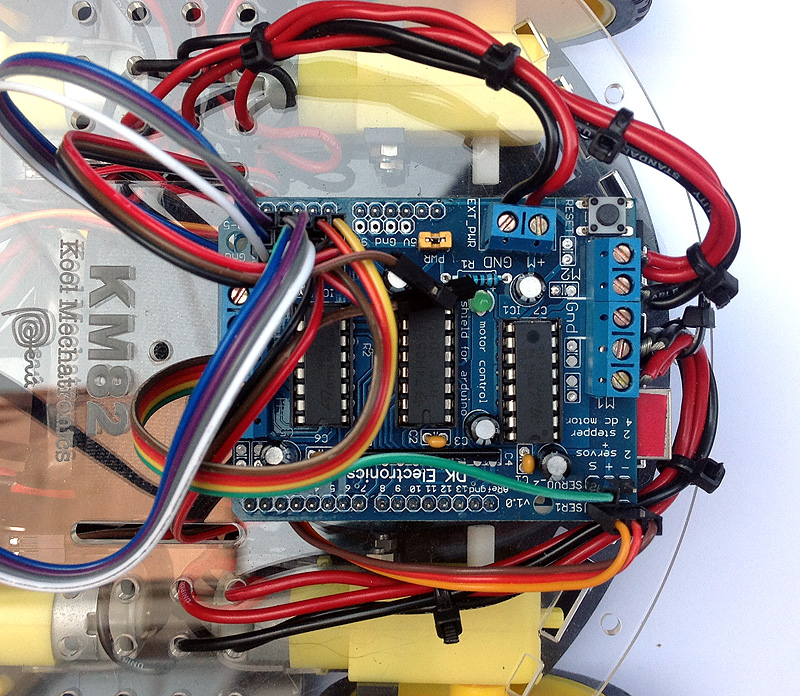
Conexión de los motores al controlador.
Solamente para versiones de KM82 que utiliza shield controlador de motores.
En este caso utilizamos dos cables de colores rojo y negó que provienen del panel de control para conectar la alimentación a los motores y el Arduino, solamente utilizarás uno de los interruptores del panel de alimentación.
En nuestra configuración de ejemplo los motores están conectados en paralelo, cada motor tiene un juego de cables rojo y negro, que se conectan en paralelo a los terminales de conexión del shield.
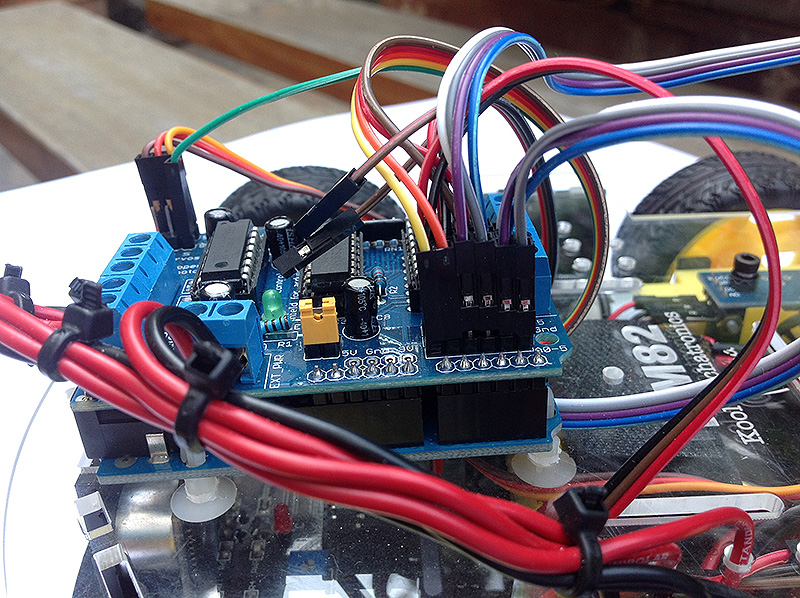
Vista final
Conexiones KM82b
Para versiones de KM82b que utiliza controlador de motores independiente.
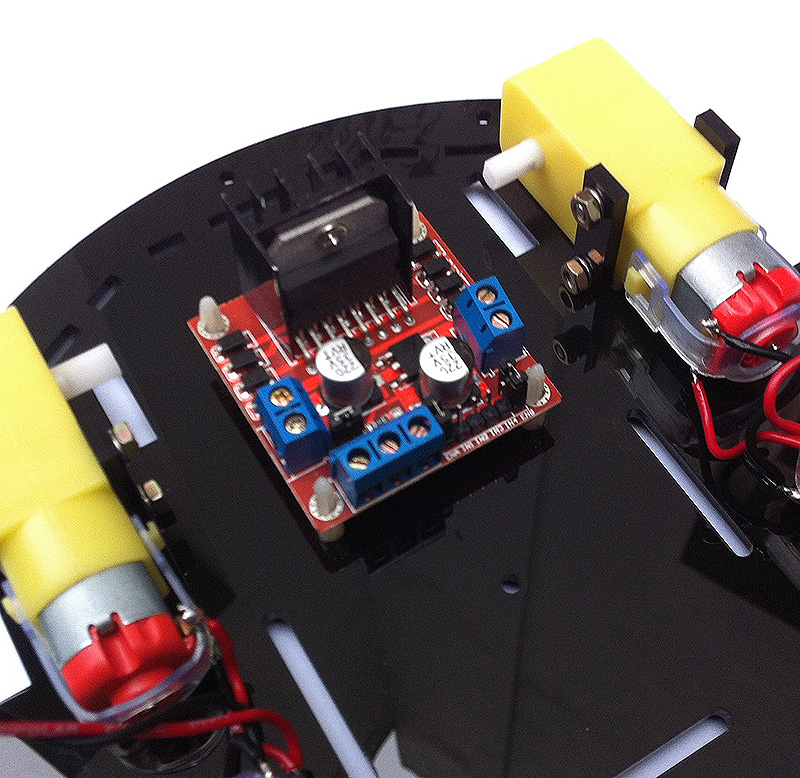
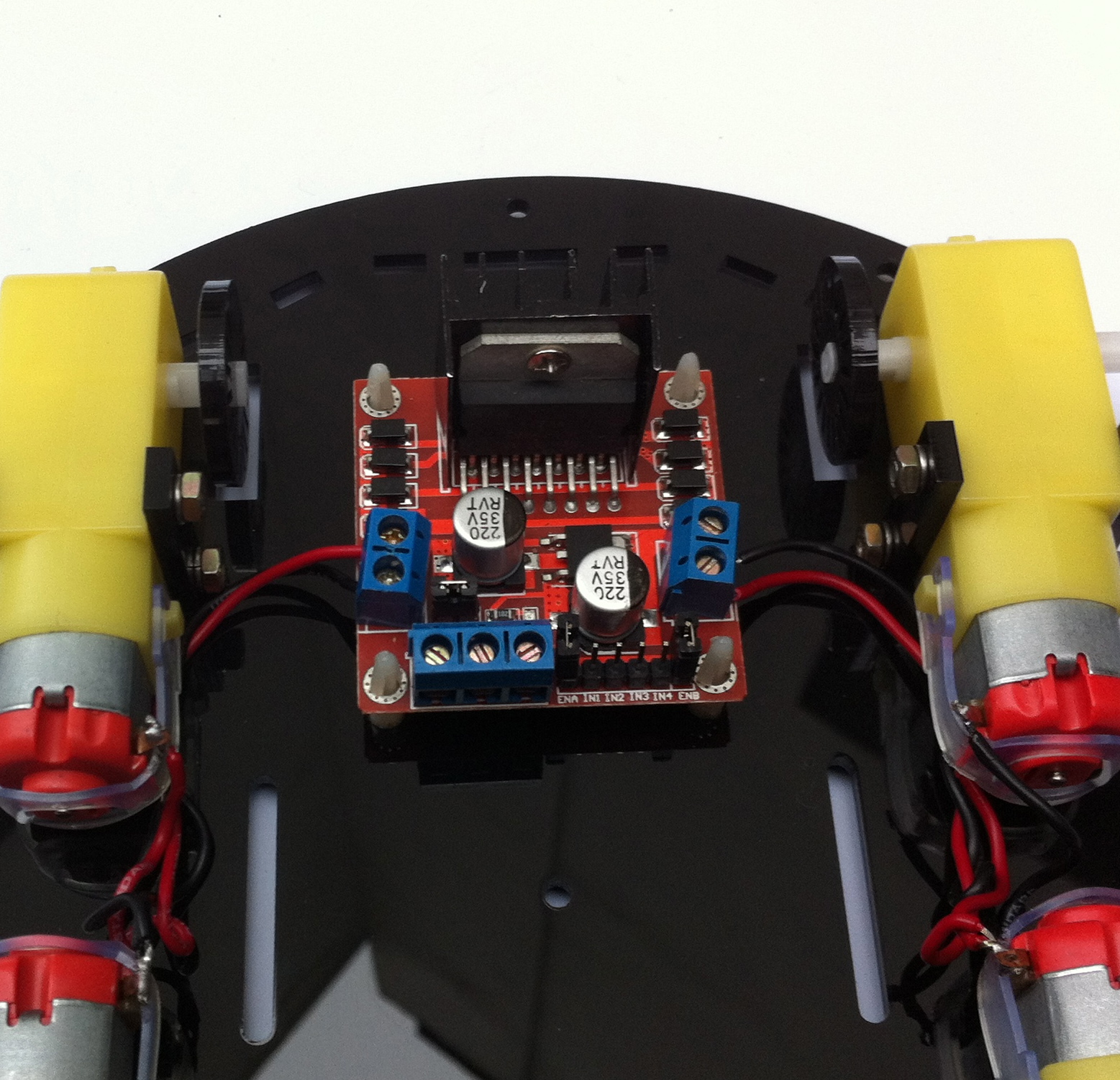
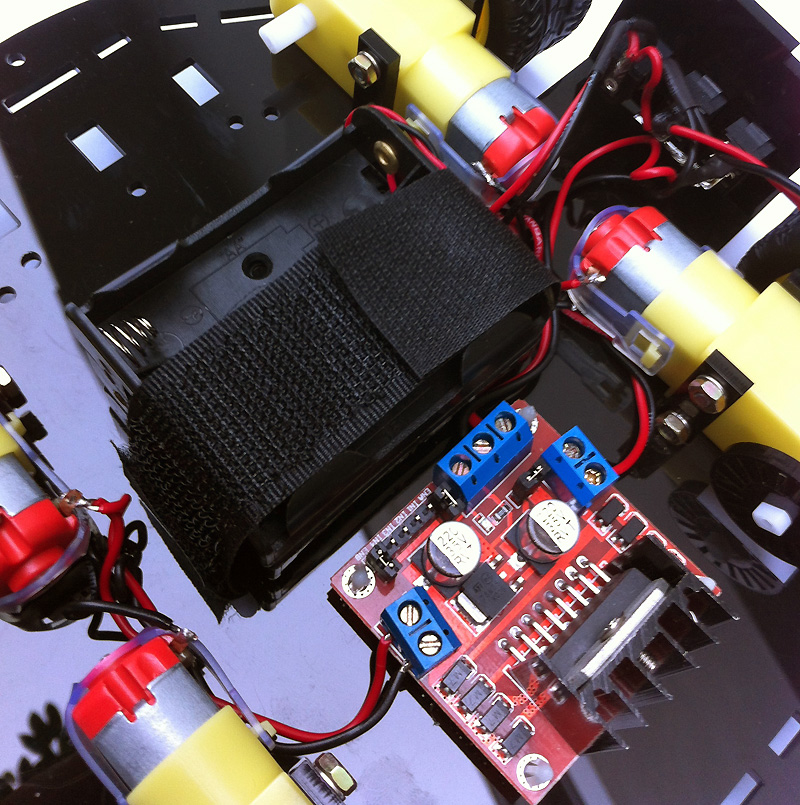
Instalación del controlador de motores
Solamente para versiones de KM82b que utiliza controlador de motores independiente.
-

KM82b Detalle de la instalación del controlador de motores. -
KM82b Detalle de la instalación del controlador de motores. -
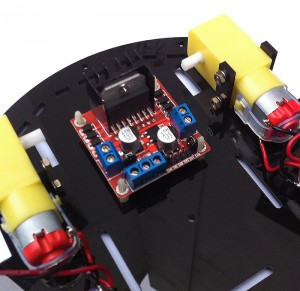
KM82b Detalle de la instalación del controlador de motores.

Conexión de los motores al controlador.
Conexión de la alimentación +5V de los sensores y el servo
Vista final
Solamente para versiones de KM82 que utiliza controlador de motores independiente.