Librerías, manuales, tutoriales y ejemplos para KM82.
En esta página encontrarás el código necesario para el funcionamiento básico de tu KM82.
Descargar código y librerías km82_robot
Código para KM82 versiones A y B,
Versión A basada en Arduino UNO + Shield.
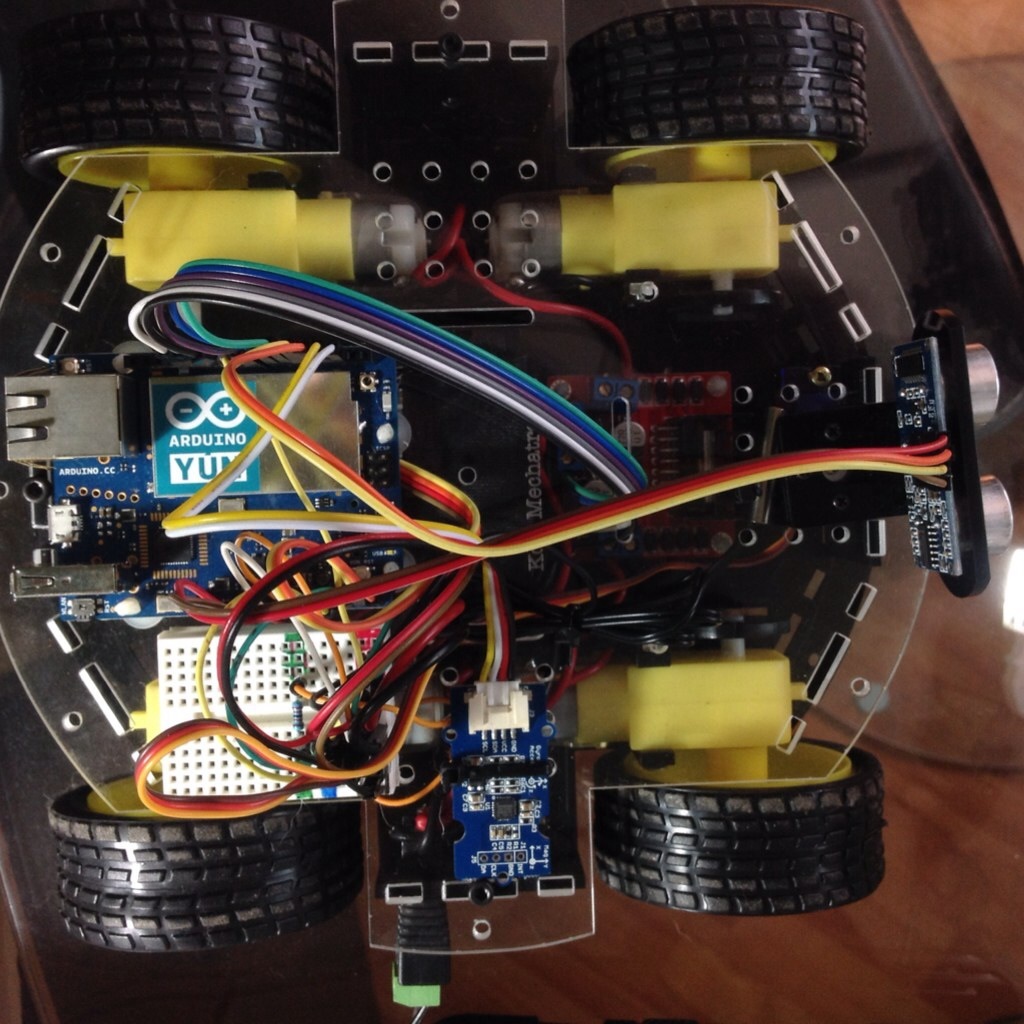
Versión B incluye las librerías utilizadas con Arduino YUN
La versión basada en Arduino YUN incorpora una IMU de 9 DOF de Grove, mas dos puentes de resistencias, el primero se utiliza junto con un sensor de temperatura que permite medir la temperatura de funcionamiento del driver de los motores y el segundo grupo de resistencias se usa para medir el voltaje de la batería, todos los datos se almacenan en un fichero de log dentro de la tarjeta SD del Arduino YUN, que es accesible mediante ssh y se puede ver en tiempo real las actualizaciones accediendo mediante ssh al S.O. del YUN mediante el comando:
#ssh root@192.168.0.100 # Sustituir con el IP del Arduino YUN (Password por defecto : arduino) #tail -f /mnt/sda1/datalog.txt 7.19|39.55|-0.05|0.08|1.07|0.34|4.82|2.10|4920.59|-2667.95|-4899.71|325.03 7.36|39.55|0.01|0.06|1.04|0.51|4.55|2.86|4720.59|-2727.95|-4859.71|333.88
Los datos que obtenemos en cada línea (separados por el carácter «|» para facilitar su importación) son:
- Voltaje de la batería -> 7.36
- Temperatura del Driver de los motores -> 39.55
- Acceleration(g) X,Y,Z -> -0.05|0.08|1.07
- Gyro(degress/s) of X,Y,Z -> 0.34|4.82|2.10
- Compass Value of X,Y,Z -> 4720.59|-2727.95|-4859.71
- Clockwise angle between magnetic north and X-Axis -> 325.03